一、顶管工程发展现状

① 顶进距离长 ② 设计轴线为曲线
二、顶管工程特殊性

① 顶进过程中管节随顶管机一起向前移动
② 顶进过程中,管节发生横向转动

三、激光经纬仪

测量原理
? 在工作井安置激光经纬仪
? 在顶管机上安装激光接收屏
? 计算激光经纬仪水平角和竖直角并设置
? 激光经纬仪发射激光,激光接收屏显示顶管机位置偏差
适应范围
? 由于激光发散及受周围温度影响,测量距离最远400米

? 激光路线为直线,因此只能用于直线顶管工程中

四、人工测量
测量原理
? 在工作井安置全站仪
? 在顶管机上安装目标反射棱镜
? 全站仪设站定向
? 全站仪测量目标棱镜,并计算顶管机位置偏差

局限性
1、在工作井安置全站仪测量,只能适应于短距离直线顶管工程
2、逐站向洞内传递控制点
① 顶管机测量不能实时进行,必须专门给测量工作留出时间
② 随着工程不断的顶进,测量工作量加大,测量时间较长
③ 洞内照明不足,现场环境恶劣,测量过程存在一定的安全隐患
五、理想的测量方法
实时测量顶管机姿态,动态显示偏差,指导顶管掘进。
① 必须有软件辅助,有自动化测量传感器支持,数据自动化传输,实现测量自动化
② 在长距离曲线顶管中,全站仪需要安置于管节上,必须解决管节移动及转动的问题
MTG-D系统概述
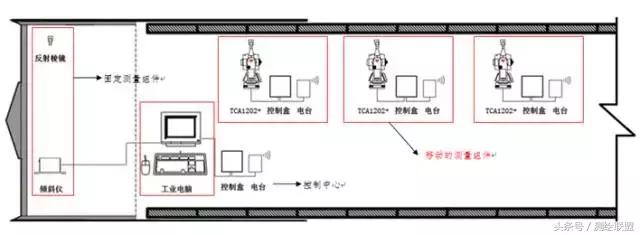
一、系统框架图
系统主要有控制管理中心、动态测量组件和固定测量组件3大部分构成
二、周期测量流程

1、周期测量开始
2、0#全站仪测量后视点…
3、获取0#全站仪测量数据
4、0#全站仪与1#全站仪对测
5、获取0#、1#全站仪测量数据
6、1#全站仪测量目标棱镜
7、获取1#全站仪测量数据
8、导线计算
9、计算顶管机位置偏差并显示
10、存储数据
三、系统组成


MTG-D技术原理
一、顶管机姿态计算

二、顶管机偏差计算

① 计算顶管机中心在设计中线上的投影点
② 计算过两点之间的位置偏差(平面、高程)
三、自动化测量传感器

四、自动安平基座应用

① 水平调节范围:±12°
② 调整后水平精度:±30″
③ 两轴跟踪速率:6 ~ 8′/秒
五、动态导线测量

① 0#全站仪测量后视
② 0#与02#全站仪对测
③ 按照第②测量至顶管机
④ 计算各测站坐标
六、电台组网无线通讯技术

七、远程监控


